
Dossier technique et plans
|
Dossier technique et plans |
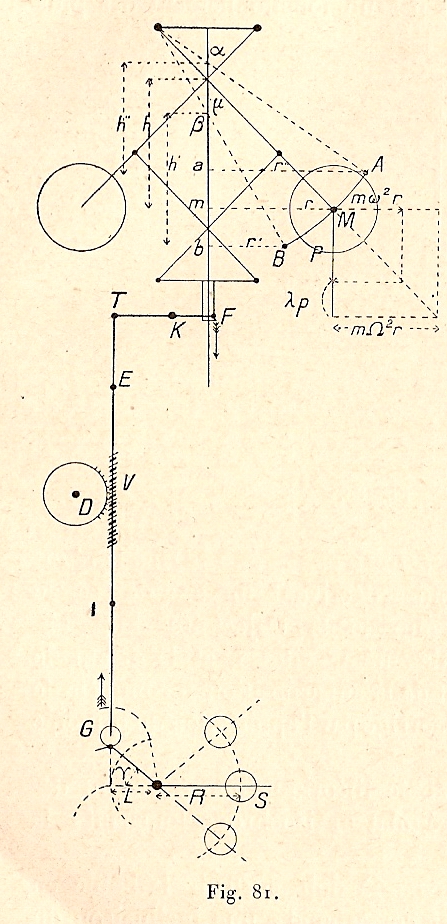
Le régulateur Farcot à bras croisés.
 Dans le régulateur Farcot, les boules décrivent un arc de cerce en rapprochant beaucoup de la
trajectoire d'un régulateur parabolique de même vitesse, et le défaut de synchronisme résultant de la superposition incomplète de ces deux trajectoires se corrige par l'application du principe des surcharges.
Dans le régulateur Farcot, les boules décrivent un arc de cerce en rapprochant beaucoup de la
trajectoire d'un régulateur parabolique de même vitesse, et le défaut de synchronisme résultant de la superposition incomplète de ces deux trajectoires se corrige par l'application du principe des surcharges.
Considérons la parabo1e théorique que devrait décrire les boules d'un régulateur isochrone tournant à la
vitesse w.
Soit (M) le point moyen où doit se tenir la boule en temps normal, ce point correspond à une inclinaison du bras de 30°environ sur la verticale, et soit
ab la course du manchon nécessaire pour assurer à la valve, ou au mécanisme de réglage, un fonctionnement convenable ; AB est l'arc utile de la parabole.
On remplace la parabole par un arc de cercle ayant son centre sur la développée en un point intermédiaire entre les points de cette courbe correspondant à A et B. L'arc décrit fait saillie vers le milieu de l'arc de parabole et rentre aux extrémités, de sorte que la Sous-normale du point milieu est plus grande que les sous-normales égales des points extrêmes.
La vitesse w1
correspondant aux points extrêmes A et B sera donc plus grande que la vitesse w
qui correspond au point milieu M.
On veut que le régulateur marche à la vitesse constante de W
aux points A et B. Pour obtenir ce résultat, on applique le principe des surcharges.
On obtiendra la vitesse W
lorsque la boule sera au point A par l'application d'une surcharge p' telle que
l
étant le coefficient de réduction de l'effort p' transporté au centre de la boule. La surcharge
p correspondant à la position M sera telle que
![]()
On voit que
p'=p"<p et h'=h"<h
La surcharge à exercer est donc variable. Elle s'obtient au moyen du dispositif représenté
sur la figure.
Le galet G s'appuie sur la développante de cercle qui termine un levier coudé dont l'autre extrémité supporte un contrepoids S. Le galet recevra des poussées
g et g', de bas en haut et transmettra des surcharges au manchon
par l'intermédiaire du levier TKF.
Il s'agit de déterminer les dimensions du levier coudé, et le contrepoids, de manière à exercer les surcharges calculées. Soient L la
distance de la charnière du levier à l'axe e la tringle GT, C la course du galet
g l'angle du levier.
La surcharge étant la même aux positions extrêmes A et B et inférieure à celle qui correspond à la position moyenne M, la grande branche du levier devra être horizontale pour la position moyenne, et la petite pour les positions extrêmes.
Ces conditions entraînent les relations suivantes:
(1) C=2Lg
(2) qL=SRcosg
(3) qL=SR
De (2) et (3) on tire
![]()
d'où g
L'équation (1) donne L.
L'une des équations (2) ou (3) donne le produit SR ; si on se donne S, on en déduira R.
Dans ce régulateur, on peut modifier la vitesse normale de la machine en déplaçant le contrepoids S le long de la grande branche du levier coudé.
C'est la tringle LG qui produit les changements de détente au moyen d'une vis V qui fait l'office de crémaillère et fait tourner une roue à denture hélicoïdale montée sur l'axe de la came en
développante de la détente Farcot. Enfin, ce régulateur comporte, en outre, un ressort à boudin qui s'oppose aux mouvements désordonnés que pourrait prendre le manchon par suite de l'isochronisme parfait de l'appareil.